
Инструкция по управлению автопилотом MICROBOAT
Правильная работа и точность прихода кораблика на точки возможна, но не может гарантироваться при приеме менее десяти GPS спутников. Рекомендуется начинать использование автопилота не менее чем через 7 минут после включения. За это время автопилот успеет поймать спутники и произвести адаптацию сенсоров.
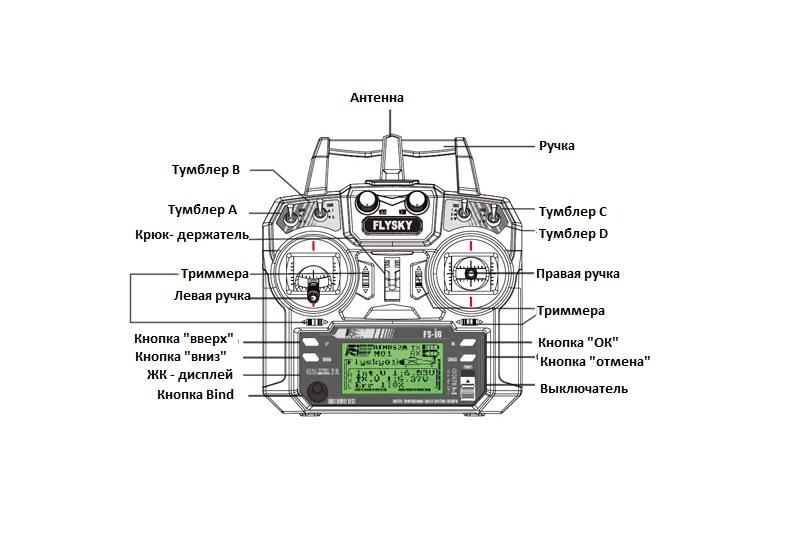
Автопилот имеет три режима работы. Режим работы всегда выбирается трехпозиционным переключателем SWC (тумблер С).
Режим №1: SWC вверх – Ручное управление кораблем, оборудованием и запоминание точек
Режим №2: SWC посередине – Режим отправки на точки и выбор действий на точках. Установка режима удержания точки
Режим №3: SWC вниз – Возврат на нулевую (домашнюю) точку.
Режим №1
Управление движением кораблика
Левый джойстик вверх – Пропорционально наклону — газ вперед
Левый джойстик вниз – Пропорционально наклону — газ назад
Правый джойстик влево/вправо – Руль
Управление оборудованием
Левый джойстик на 1 секунду влево поочередно – Включить/выключить габариты
Левый джойстик на 1 секунду вправо поочередно – Включить/выключить глубиномер
SWA – вниз/вверх – Открыть или закрыть бункер 1
SWB – вниз/вверх – Открыть или закрыть бункер 2 (однобункерный)
Крутилка VRA – яркость фар
Крутилка VRB – Открытие бункера два на произвольный угол
Запоминание точек
Правый джойстик вверх вниз с секундной задержкой – Выбор текущей точки (текущая точка отображается на дисплее)
SWD щелчек сверху вниз – Запомнить текущую выбранную точку
Режим №2
Переключение на этот режим приведет к немедленному останову кораблика для выполнения дальнейших действий.
Правый джойстик вверх/вниз с секундной задержкой – Выбор текущей точки (текущая точка отображается на дисплее) так же как и в первом режиме.
SWD- вниз поставить корабль в режим удержания точки. Если кораблик затем отправляется на точку то он станет на удержание и после выполнения задания.
SWA – вниз – Открыть бункер 1 по прибытии на точку
SWB – вниз – Открыть бункер 2 (однобункерный) по прибытии на точку
Левый джойстик вправо на одну секунду – Отправить кораблик на выбранную точку с автовозвратом на нулевую точку после выполнения сброса.
Левый джойстик влево на одну секунду – Отправить кораблик на выбранную точку БЕЗ автовозврата.
Одновременно левый и правый джойстик влево — Выбор места рыбалки (от 0 до 9 – инкремент по кругу)
Крутилка VRA – Изменение положения регулирует максимальную скорость ЗАВОЗА по GPS от 0 до 36 км/ч (кратковременно скорость показывается на дисплее)
Крутилка VRB – Изменение положения регулирует максимальный газ ЗАВОЗА от 30 до 100% (кратковременно газ показывается на дисплее)
Режим №3
Переключение на этот режим приведет к немедленному возврату корабля на нулевую точку. Во время возврата можно регулировать скорость возврата/автовозврата корабля
Крутилка VRA – Изменение положения регулирует максимальную скорость ВОЗВРАТА по GPS от 0 до 36 км/ч (кратковременно скорость показывается на дисплее)
Крутилка VRB – Изменение положения регулирует максимальный газ ВОЗВРАТА от 30 до 100% (кратковременно газ показывается на дисплее)
Если вы не хотите изменять скорости завоза и возврата, не трогайте крутилки VRA и VRB в режимах №2 и №3 т.к. изменение их положения в этих режимах приведет к перезаписи скоростей в соответствии с углом поворота.
Автопилот имеет WIFI модуль, который позволяет подключаться к нему программами для управления БПЛА (QGroundControl и MissionPlaner). Рекомендуем использовать QGroundControl для андроид или iphone. Эта возможность даёт богатые возможности по тонкой настройке и диагностике автопилота непосредственно на воде до 20 метров.
После подключения смартфоном к точке доступа ESP_***** (пароль не требуется) и настройки подключения в котором указывается TCP адрес 192.168.4.1 и порт 23. производится подключение и переход в меню Parameters
Настройки крайних положений серводвигателей для управления бункерами находятся в группе SERVO
SERVO6_MIN – Крайнее положение закрытия бункера 2
SERVO6_MАХ – Крайнее положение открытия бункера 2
SERVO7_MIN – Крайнее положение закрытия бункера 1
SERVO7_MАХ – Крайнее положение открытия бункера 1
При покупке корабля с автопилотом, положения серводвигателей уже установлены в нужные положения.